Solve Graph - Shortest Path (Seattle)¶
The following is a complete example, using the Python API, of solving a graph created with Seattle road network data for a shortest path problem via the /solve/graph endpoint. For more information on Network Graphs & Solvers, see Network Graphs & Solvers Concepts.
Prerequisites¶
The prerequisites for running the shortest path solve graph example are listed below:
- Kinetica (v.
7.0or later) - Graph server enabled
- Python API
Solve graph scriptSeattle road network CSV file
Python API Installation¶
The native Kinetica Python API is accessible through the following means:
- For development on the Kinetica server:
- For development not on the Kinetica server:
Kinetica RPM¶
In default Kinetica installations, the native Python API is located in the
/opt/gpudb/api/python directory. The
/opt/gpudb/bin/gpudb_python wrapper script is provided, which sets the
execution environment appropriately.
Test the installation:
/opt/gpudb/bin/gpudb_python /opt/gpudb/api/python/examples/example.py
Important
When developing on the Kinetica server, use /opt/gpudb/bin/gpudb_python to run Python programs and /opt/gpudb/bin/gpudb_pip to install dependent libraries.
Git¶
In the desired directory, run the following but be sure to replace
<kinetica-version>with the name of the installed Kinetica version, e.g.,v7.0:git clone -b release/<kinetica-version> --single-branch https://github.com/kineticadb/kinetica-api-python.git
Change directory into the newly downloaded repository:
cd kinetica-api-pythonIn the root directory of the unzipped repository, install the Kinetica API:
sudo python setup.py install
Test the installation (Python 2.7 (or greater) is necessary for running the API example):
python examples/example.py
PyPI¶
The Python package manager, pip, is required to install the API from PyPI.
Install the API:
pip install gpudb --upgrade
Test the installation:
python -c "import gpudb;print('Import Successful')"
If Import Successful is displayed, the API has been installed as is ready for use.
Data File¶
The example script makes reference to a road_weights.csv data file
in the current directory. This can be updated to point to a valid path on the
host where the file will be located, or the script can be run with the data
file in the current directory.
CSV = "road_weights.csv"
Script Detail¶
This example is going to demonstrate solving (both individual and batch solve) for the shortest path between source points and several destination points located within a road network in Seattle.
Constants¶
Several constants are defined at the beginning of the script:
HOST/PORT-- host and port values for the databaseOPTION_NO_ERROR-- reference to a /clear/table option for ease of use and repeatabilityTABLE_SRN-- the name of the table into which the Seattle road network dataset is loadedGRAPH_S-- the Seattle road network graphGRAPH_S_SPSOLVED/GRAPH_S_SPSOLVED2/GRAPH_S_SPSOLVED3-- the Seattle road network graph shortest path solution tables
HOST = "127.0.0.1"
PORT = "9191"
OPTION_NO_ERROR = {"no_error_if_not_exists": "true"}
TABLE_SRN = "seattle_road_network"
GRAPH_S = TABLE_SRN + "_graph"
GRAPH_S_SPSOLVED = GRAPH_S + "_shortest_path_solved"
GRAPH_S_SPSOLVED2 = GRAPH_S + "_shortest_path_solved2"
GRAPH_S_SPSOLVED3 = GRAPH_S + "_shortest_path_solved3"
Graph Creation¶
One graph is used for the shortest path solve graph example utilized in the
script: seattle_road_network_graph, a graph based on the road_weights
dataset (the CSV file mentioned in Prerequisites).
The GRAPH_S graph is created with the following characteristics:
- It is directed because the roads in the graph have directionality (one-way and two-way roads)
- It has no explicitly defined
nodesbecause the example relies on implicit nodes attached to the defined edges - The
edgesare represented using WKT LINESTRINGs in theWKTLINEcolumn of theseattle_road_networktable (EDGE_WKTLINE). The road segments' directionality is derived from theTwoWaycolumn of theseattle_road_networktable (EDGE_DIRECTION). - The
weightsare represented using the time taken to travel the segment found in thetimecolumn of theseattle_road_networktable (WEIGHTS_VALUESPECIFIED). The weights are matched to the edges using the sameWKTLINEcolumn as edges (WEIGHTS_EDGE_WKTLINE) and the sameTwoWaycolumn as the edge direction (WEIGHTS_EDGE_DIRECTION). - It has no inherent
restrictionsfor any of the nodes or edges in the graph - It will be replaced with this instance of the graph if a graph of the same
name exists (
recreate)
print("Creating {}".format(GRAPH_S))
create_s_graph_response = kinetica.create_graph(
graph_name=GRAPH_S,
directed_graph=True,
nodes=[],
edges=[
TABLE_SRN + ".WKTLINE AS EDGE_WKTLINE",
TABLE_SRN + ".TwoWay AS EDGE_DIRECTION"
],
weights=[
TABLE_SRN + ".WKTLINE AS WEIGHTS_EDGE_WKTLINE",
TABLE_SRN + ".TwoWay AS WEIGHTS_EDGE_DIRECTION",
TABLE_SRN + ".time AS WEIGHTS_VALUESPECIFIED"
],
restrictions=[],
options={
"recreate": "true",
"enable_graph_draw": "true",
"graph_table": "seattle_graph_debug"
}
)
Shortest Path¶
Single Source to Single Destination¶
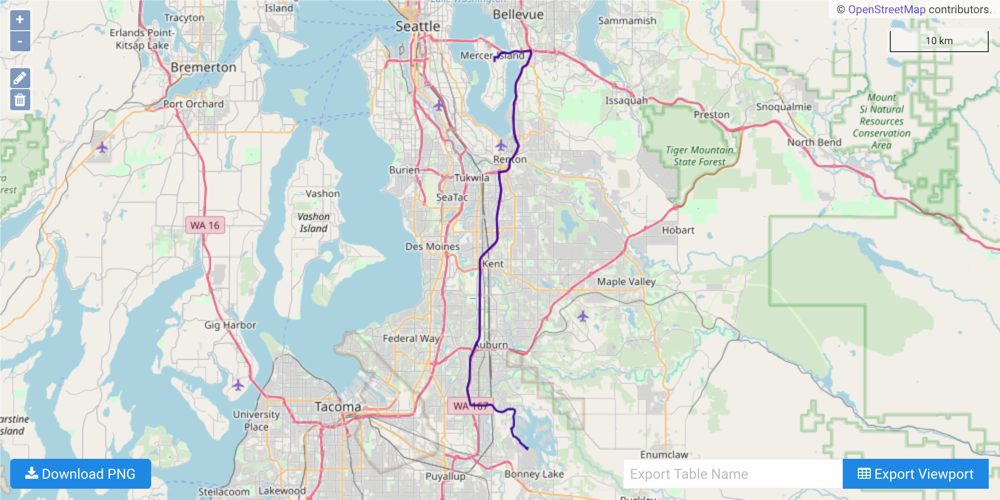
The first example illustrates a simple shortest path solve from a single source node to a single destination node. First, the source node and destination node are defined.
source_nodes = ["POINT(-122.1792501 47.2113606)"]
destination_nodes = ["POINT(-122.2221 47.5707)"]
Next, the seattle_road_network_graph graph is solved with the solve results
being exported to the response:
solve_s_spgraph_response = kinetica.solve_graph(
graph_name=GRAPH_S,
solver_type="SHORTEST_PATH",
source_nodes=source_nodes,
destination_nodes=destination_nodes,
solution_table=GRAPH_S_SPSOLVED,
options={"export_solve_results": "true"}
)["result_per_destination_node"]
The cost for the source node to visit the destination node is represented as time in minutes:
Cost per destination node when source node = ['POINT(-122.1792501 47.2113606)']:
+--------------------------+---------------------+
| Destination Node | Cost (in minutes) |
+==========================+=====================+
| POINT(-122.2221 47.5707) | 40.6214 |
+--------------------------+---------------------+
The solution output to WMS:
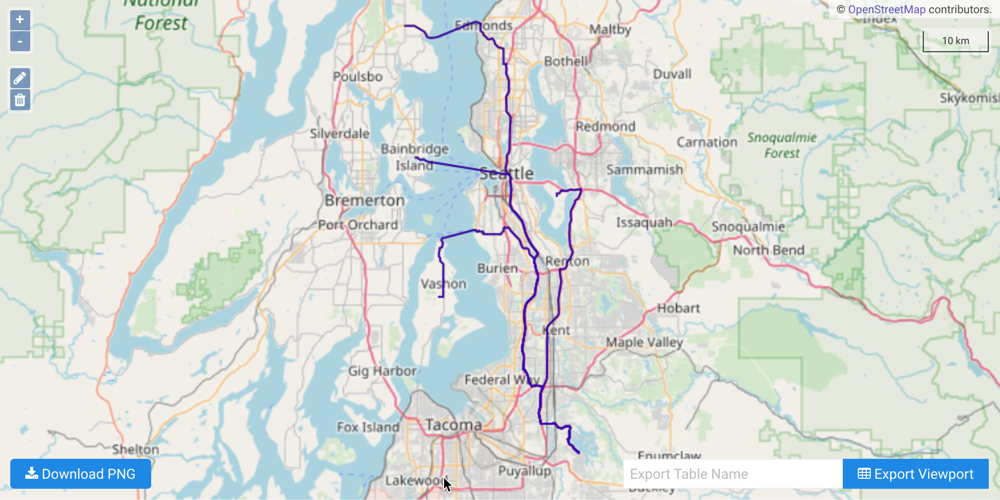
Single Source to Many Destinations¶
The second example illustrates a shortest path solve from a single source node to many destination nodes. First, the source node and destination nodes are defined. When one source node and many destination nodes are provided, the graph solver will calculate a shortest path solve for each destination node.
source_nodes = ["POINT(-122.1792501 47.2113606)"]
destination_nodes = [
"POINT(-122.2221 47.5707)",
"POINT(-122.541017 47.809121)",
"POINT(-122.520440 47.624725)",
"POINT(-122.467915 47.427280)"
]
Next, the seattle_road_network_graph graph is solved with the solve results
being exported to the response
solve_s_spgraph_response2 = kinetica.solve_graph(
graph_name=GRAPH_S,
solver_type="SHORTEST_PATH",
source_nodes=source_nodes,
destination_nodes=destination_nodes,
solution_table=GRAPH_S_SPSOLVED2,
options={"export_solve_results": "true"}
)["result_per_destination_node"]
The cost for the source node to visit each of the destination nodes separately is represented as time in minutes:
Cost per destination node when source node = ['POINT(-122.1792501 47.2113606)']:
+------------------------------+---------------------+
| Destination Node | Cost (in minutes) |
+==============================+=====================+
| POINT(-122.2221 47.5707) | 40.6214 |
+------------------------------+---------------------+
| POINT(-122.541017 47.809121) | 90.2934 |
+------------------------------+---------------------+
| POINT(-122.520440 47.624725) | 79.7342 |
+------------------------------+---------------------+
| POINT(-122.467915 47.427280) | 69.0357 |
+------------------------------+---------------------+
The solutions output to WMS:
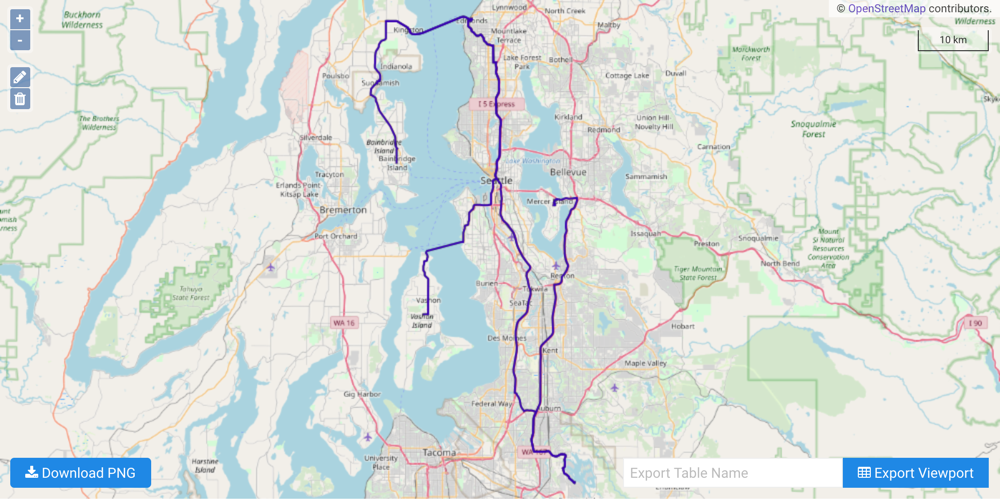
Many Sources to Many Destinations¶
The third example illustrates a shortest path solve from a many source nodes
to many destination nodes. First, the source node and destination nodes are
defined. If many source node and many destination nodes are provided, the graph
solver will pair the source and destination node by list index and calculate a
shortest path solve for each pair. For this example, there are two starting
points (POINT(-122.1792501 47.2113606) and
POINT(-122.375180125237 47.8122103214264)) and paths will be calculated from
the first source to two different destinations and from the second source to two
other destinations.
Important
Calculations from multiple unique sources are faster and more efficient than calculations with one unique source, but results may differ slightly between multiple unique source calculations and single unique source calculations (less than ~1% variance).
source_nodes = [
"POINT(-122.1792501 47.2113606)",
"POINT(-122.1792501 47.2113606)",
"POINT(-122.375180125237 47.8122103214264)",
"POINT(-122.375180125237 47.8122103214264)"
]
destination_nodes = [
"POINT(-122.2221 47.5707)",
"POINT(-122.541017 47.809121)",
"POINT(-122.520440 47.624725)",
"POINT(-122.467915 47.427280)"
]
Next, the seattle_road_network_graph graph is solved with the solve results
being exported to the response:
solve_s_spgraph_response3 = kinetica.solve_graph(
graph_name=GRAPH_S,
solver_type="SHORTEST_PATH",
source_nodes=source_nodes,
destination_nodes=destination_nodes,
solution_table=GRAPH_S_SPSOLVED3,
options={"export_solve_results": "true"}
)["result_per_destination_node"]
The cost for the source node to visit each of the destination nodes separately is represented as time in minutes:
Cost per destination node:
+-------------------------------------------+------------------------------+---------------------+
| Source Node | Destination Node | Cost (in minutes) |
+===========================================+==============================+=====================+
| POINT(-122.1792501 47.2113606) | POINT(-122.2221 47.5707) | 40.6723 |
+-------------------------------------------+------------------------------+---------------------+
| POINT(-122.1792501 47.2113606) | POINT(-122.541017 47.809121) | 90.2636 |
+-------------------------------------------+------------------------------+---------------------+
| POINT(-122.375180125237 47.8122103214264) | POINT(-122.520440 47.624725) | 51.1153 |
+-------------------------------------------+------------------------------+---------------------+
| POINT(-122.375180125237 47.8122103214264) | POINT(-122.467915 47.427280) | 59.9621 |
+-------------------------------------------+------------------------------+---------------------+
The solutions output to WMS:
Download & Run¶
Included below is a complete example containing all the above requests, the data files, and output.
To run the complete sample, ensure the
solve_graph_seattle_shortest_path.py and road_weights.csv
files are in the same directory (assuming the locations were not changed in the
solve_graph_seattle_shortest_path.py script); then switch to that
directory and do the following:
If on the Kinetica host:
/opt/gpudb/bin/gpudb_python solve_graph_seattle_shortest_path.py
If running after using PyPI or GitHub to install the Python API:
python solve_graph_seattle_shortest_path.py